自适应巡航控制系统是在按设定车速进行巡航控制的系统上,增加了与前方车辆保持合理间距控制功能的新系统。
自适应巡航系统主要由自适应巡航控制系统传感器、自适应巡航控制系统控制器、发动机管理控制器、电子节气门执行器、制动执行器(例如ABS/ESP等)组成。
自适应巡航控制系统是在按设定车速进行巡航控制的系统上,增加了与前方车辆保持合理间距控制功能的新系统。
自适应巡航系统主要由自适应巡航控制系统传感器、自适应巡航控制系统控制器、发动机管理控制器、电子节气门执行器、制动执行器(例如ABS/ESP等)组成。
自适应巡航控制系统
adaptive cruise control
ACC


自适应巡航系统主要由自适应巡航控制系统传感器、自适应巡航控制系统控制器、发动机管理控制器、电子节气门执行器、制动执行器(例如ABS/ESP等)组成。
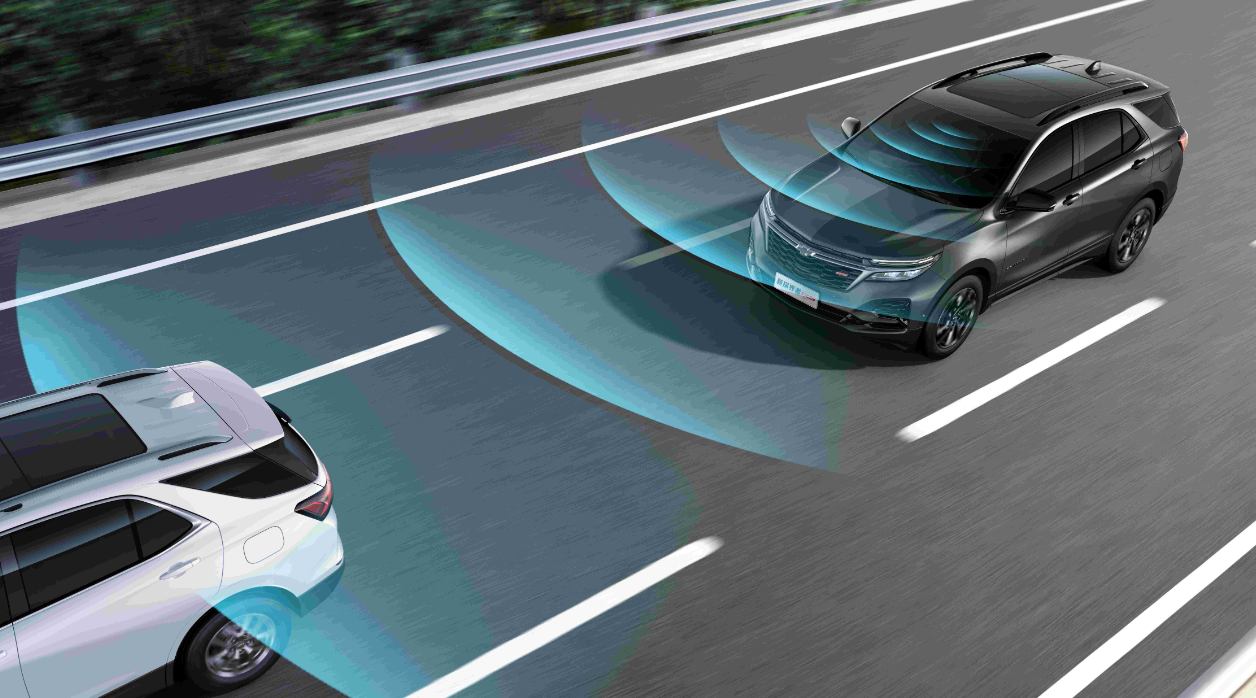
根据车间距传感器检测的信息,以及本车的车速传感器和横摆角速度传感器检测确定的本车行驶路线信息,来判断在本车的同一条车道上前方有无车辆行驶。车间距离传感器采用了微波雷达或距离雷达。
当同一条车道前方没有车辆时,像通常的巡航控制一样按照设定的车速行驶;当前方出现车辆时,以低于设定车速行驶,控制本车与前方车辆的合理间距。四种典型的功能:
(l)当前方无车辆时,ACC车辆将处于普通的巡航驾驶状态,按照驾驶
员设定的车速行驶,驾驶员只需要进行方向的控制(匀速控制)
(2)当ACC车辆前方出现目标车辆时,如果目标车辆的速度小于ACC车辆
时,ACC车辆将自动开始进行减速控制,确保两车的距离为所设定的安全距离
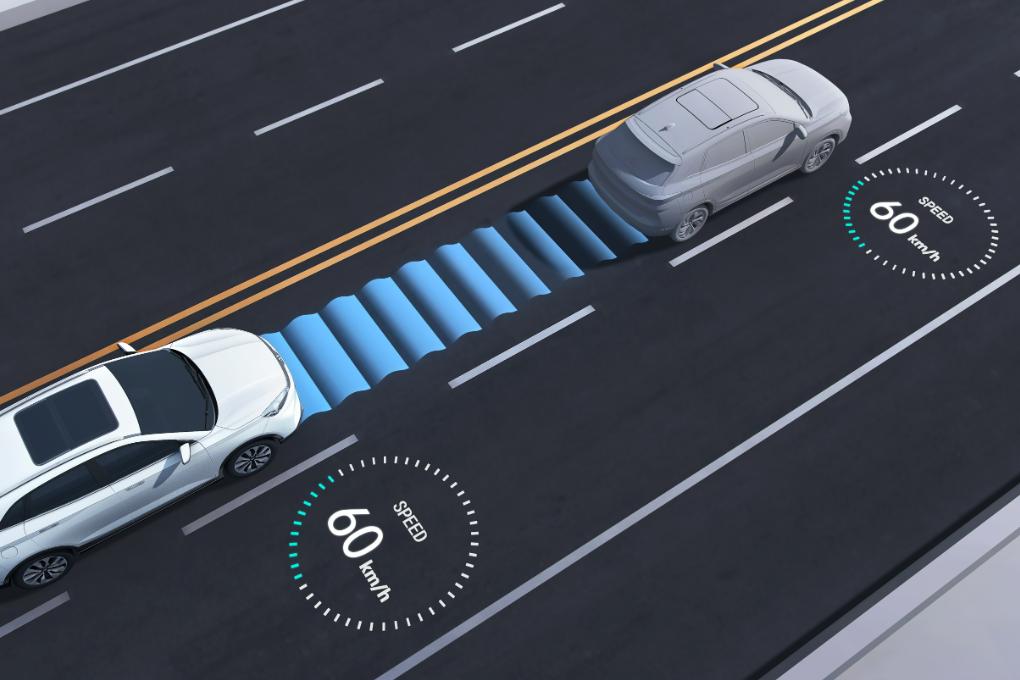
(3)当两车之间的距离等于安全车距后,采取跟随控制,即与目标车辆以相
同的车速行驶。
(4)当前方的目标车辆发生移线,或主车移线行驶使得主车前方又无行驶车辆时,ACC系统将对主车进行加速控制,使主车恢复至设定的行驶速度。
装有自适应巡航控制系统的智能汽车,通过雷达和计算机来鉴别靠近车辆的是自行车、汽车还是行人根据道路情况控制车辆行驶状态,完全或部分地取代了驾驶员的操作。
1.自适应巡航 ·搜狐汽车